|
| template<typename Symmetry , typename MatrixType , typename MatrixType2 , typename MpoMatrixType > |
| void | contract_L (const Tripod< Symmetry, MatrixType2 > &Lold, const vector< Biped< Symmetry, MatrixType > > &Abra, const vector< vector< vector< Biped< Symmetry, MpoMatrixType > > > > &W, const vector< Biped< Symmetry, MatrixType > > &Aket, const vector< qarray< Symmetry::Nq > > &qloc, const vector< qarray< Symmetry::Nq > > &qOp, Tripod< Symmetry, MatrixType2 > &Lnew, bool RANDOMIZE=false, tuple< CONTRACT_LR_MODE, size_t > MODE_input=make_pair(FULL, 0), const std::unordered_map< pair< qarray< Symmetry::Nq >, size_t >, size_t > &basis_order_map={}) |
| |
| template<typename Symmetry , typename MatrixType , typename MatrixType2 , typename MpoMatrixType > |
| void | contract_R (const Tripod< Symmetry, MatrixType2 > &Rold, const vector< Biped< Symmetry, MatrixType > > &Abra, const vector< vector< vector< Biped< Symmetry, MpoMatrixType > > > > &W, const vector< Biped< Symmetry, MatrixType > > &Aket, const vector< qarray< Symmetry::Nq > > &qloc, const vector< qarray< Symmetry::Nq > > &qOp, Tripod< Symmetry, MatrixType2 > &Rnew, bool RANDOMIZE=false, tuple< CONTRACT_LR_MODE, size_t > MODE_input=make_pair(FULL, 0), const std::unordered_map< pair< qarray< Symmetry::Nq >, size_t >, size_t > &basis_order_map={}) |
| |
| template<typename Symmetry , typename MatrixType , typename MpoScalar > |
| void | contract_L (const Tripod< Symmetry, MatrixType > &Lold, const vector< Biped< Symmetry, MatrixType > > &Abra, const unordered_map< tuple< size_t, size_t, size_t, qarray< Symmetry::Nq >, qarray< Symmetry::Nq > >, SparseMatrix< MpoScalar > > &V, const vector< Biped< Symmetry, MatrixType > > &Aket, const vector< qarray< Symmetry::Nq > > &qloc, const vector< qarray< Symmetry::Nq > > &qOp, Tripod< Symmetry, MatrixType > &Lnew) |
| |
| template<typename Symmetry , typename MatrixType , typename MpoScalar > |
| void | contract_R (const Tripod< Symmetry, MatrixType > &Rold, const vector< Biped< Symmetry, MatrixType > > &Abra, const unordered_map< tuple< size_t, size_t, size_t, qarray< Symmetry::Nq >, qarray< Symmetry::Nq > >, SparseMatrix< MpoScalar > > &V, const vector< Biped< Symmetry, MatrixType > > &Aket, const vector< qarray< Symmetry::Nq > > &qloc, const vector< qarray< Symmetry::Nq > > &qOp, Tripod< Symmetry, MatrixType > &Rnew) |
| |
| template<typename Symmetry , typename MatrixType , typename MatrixType2 > |
| void | contract_L (const Biped< Symmetry, MatrixType2 > &Lold, const vector< Biped< Symmetry, MatrixType > > &Abra, const vector< Biped< Symmetry, MatrixType > > &Aket, const vector< qarray< Symmetry::Nq > > &qloc, Biped< Symmetry, MatrixType2 > &Lnew, bool RANDOMIZE=false, bool CLEAR=false) |
| |
| template<typename Symmetry , typename MatrixType , typename MatrixType2 > |
| void | contract_R (const Biped< Symmetry, MatrixType2 > &Rold, const vector< Biped< Symmetry, MatrixType > > &Abra, const vector< Biped< Symmetry, MatrixType > > &Aket, const vector< qarray< Symmetry::Nq > > &qloc, Biped< Symmetry, MatrixType2 > &Rnew, bool RANDOMIZE=false, bool CLEAR=false) |
| |
| template<typename Symmetry , typename Scalar , typename MpoMatrixType > |
| void | contract_GRALF (const Tripod< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > &L, const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Abra, const vector< vector< vector< Biped< Symmetry, MpoMatrixType > > > > &W, const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Aket, const Tripod< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > &R, const vector< qarray< Symmetry::Nq > > &qloc, const vector< qarray< Symmetry::Nq > > &qOp, Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > &Tout, DMRG::DIRECTION::OPTION DIR) |
| |
| template<typename Symmetry , typename Scalar , typename MpoMatrixType > |
| Scalar | contract_LR (const Tripod< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > &L, const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Abra, const vector< vector< vector< Biped< Symmetry, MpoMatrixType > > > > &W, const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Aket, const Tripod< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > &R, const vector< qarray< Symmetry::Nq > > &qloc, const vector< qarray< Symmetry::Nq > > &qOp) |
| |
| template<typename Symmetry , typename Scalar > |
| Scalar | contract_LR (pair< qarray< Symmetry::Nq >, size_t > fixed_b, const Tripod< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > &L, const Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > &R) |
| |
| template<typename Symmetry , typename Scalar > |
| Scalar | contract_LR (pair< qarray< Symmetry::Nq >, size_t > fixed_a, const Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > &L, const Tripod< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > &R) |
| |
| template<typename Symmetry , typename Scalar > |
| Scalar | contract_LR (const Tripod< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > &L, const Tripod< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > &R) |
| |
| template<typename Symmetry , typename MatrixType , typename MpoMatrixType > |
| void | contract_R (const Tripod< Symmetry, MatrixType > &Rold, const vector< Biped< Symmetry, MatrixType > > &Abra, const vector< vector< vector< Biped< Symmetry, MpoMatrixType > > > > &Wbot, const vector< vector< vector< Biped< Symmetry, MpoMatrixType > > > > &Wtop, const vector< Biped< Symmetry, MatrixType > > &Aket, const vector< qarray< Symmetry::Nq > > &qloc, const vector< qarray< Symmetry::Nq > > &qOpBot, const vector< qarray< Symmetry::Nq > > &qOpTop, Tripod< Symmetry, MatrixType > &Rnew) |
| |
| template<typename Symmetry , typename MatrixType , typename MpoMatrixType > |
| void | contract_L (const Multipede< 4, Symmetry, MatrixType > &Lold, const vector< Biped< Symmetry, MatrixType > > &Abra, const vector< vector< vector< Biped< Symmetry, MpoMatrixType > > > > &Wbot, const vector< vector< vector< Biped< Symmetry, MpoMatrixType > > > > &Wtop, const vector< Biped< Symmetry, MatrixType > > &Aket, const vector< qarray< Symmetry::Nq > > &qloc, const vector< qarray< Symmetry::Nq > > &qOpBot, const vector< qarray< Symmetry::Nq > > &qOpTop, Multipede< 4, Symmetry, MatrixType > &Lnew) |
| |
| template<typename Symmetry , typename MatrixType , typename MpoMatrixType > |
| void | contract_C0 (vector< qarray< Symmetry::Nq > > qloc, vector< qarray< Symmetry::Nq > > qOp, const vector< vector< vector< Biped< Symmetry, MpoMatrixType > > > > &W, const vector< Biped< Symmetry, MatrixType > > &Aket, vector< Tripod< Symmetry, MatrixType > > &Cnext) |
| |
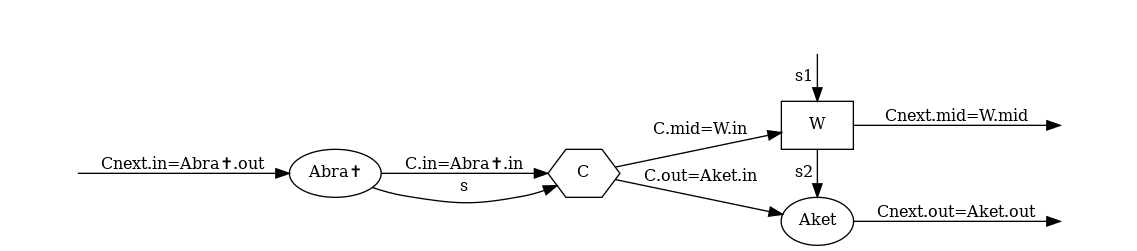
| template<typename Symmetry , typename MatrixType , typename MpoMatrixType > |
| void | contract_C (vector< qarray< Symmetry::Nq > > qloc, vector< qarray< Symmetry::Nq > > qOp, const vector< Biped< Symmetry, MatrixType > > &Abra, const vector< vector< vector< Biped< Symmetry, MpoMatrixType > > > > &W, const vector< Biped< Symmetry, MatrixType > > &Aket, const vector< Tripod< Symmetry, MatrixType > > &C, vector< Tripod< Symmetry, MatrixType > > &Cnext) |
| |
| template<typename Symmetry , typename Scalar , typename MpoMatrixType > |
| void | contract_AW (const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Ain, const vector< qarray< Symmetry::Nq > > &qloc, const vector< vector< vector< Biped< Symmetry, MpoMatrixType > > > > &W, const vector< qarray< Symmetry::Nq > > &qOp, const Qbasis< Symmetry > &qauxAl, const Qbasis< Symmetry > &qauxWl, const Qbasis< Symmetry > &qauxAr, const Qbasis< Symmetry > &qauxWr, vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Aout, bool FORCE_QTOT=false, qarray< Symmetry::Nq > Qtot=Symmetry::qvacuum()) |
| |
| template<typename Symmetry , typename Scalar > |
| vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > | extend_A (const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &A, const vector< qarray< Symmetry::Nq > > &qloc) |
| |
| template<typename Symmetry , typename Scalar > |
| void | extend_A (vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &A, const vector< qarray< Symmetry::Nq > > &qloc) |
| |
| template<typename Symmetry , typename Scalar > |
| void | contract_AA2 (const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &A1, const vector< qarray< Symmetry::Nq > > &qloc1, const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &A2, const vector< qarray< Symmetry::Nq > > &qloc2, vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Apair, bool DRY=false) |
| |
| template<typename Symmetry , typename Scalar > |
| void | contract_AA (const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &A1, const vector< qarray< Symmetry::Nq > > &qloc1, const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &A2, const vector< qarray< Symmetry::Nq > > &qloc2, const qarray< Symmetry::Nq > &Qtop, const qarray< Symmetry::Nq > &Qbot, vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Apair, bool DRY=false) |
| |
| template<typename Symmetry , typename Scalar > |
| void | contract_AAAA (const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &A1, vector< qarray< Symmetry::Nq > > qloc1, const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &A2, vector< qarray< Symmetry::Nq > > qloc2, const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &A3, vector< qarray< Symmetry::Nq > > qloc3, const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &A4, vector< qarray< Symmetry::Nq > > qloc4, boost::multi_array< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > >, 4 > &Aquartett) |
| |
| template<typename Symmetry , typename Scalar > |
| void | split_AA (DMRG::DIRECTION::OPTION DIR, const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Apair, const vector< qarray< Symmetry::Nq > > &qloc_l, vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Al, const vector< qarray< Symmetry::Nq > > &qloc_r, vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Ar, const qarray< Symmetry::Nq > &qtop, const qarray< Symmetry::Nq > &qbot, double eps_svd, size_t min_Nsv, size_t max_Nsv) |
| |
| template<typename Symmetry , typename Scalar > |
| void | split_AA (DMRG::DIRECTION::OPTION DIR, const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Apair, const vector< qarray< Symmetry::Nq > > &qloc_l, vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Al, const vector< qarray< Symmetry::Nq > > &qloc_r, vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Ar, const qarray< Symmetry::Nq > &qtop, const qarray< Symmetry::Nq > &qbot, Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > &C, bool SEPARATE_SV, double &truncWeight, double &S, double eps_svd, size_t min_Nsv, size_t max_Nsv) |
| |
| template<typename Symmetry , typename Scalar > |
| void | split_AA2 (DMRG::DIRECTION::OPTION DIR, const Qbasis< Symmetry > &locBasis, const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Apair, const vector< qarray< Symmetry::Nq > > &qloc_l, vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Al, const vector< qarray< Symmetry::Nq > > &qloc_r, vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Ar, const qarray< Symmetry::Nq > &qtop, const qarray< Symmetry::Nq > &qbot, double eps_svd, size_t min_Nsv, size_t max_Nsv) |
| |
| template<typename Symmetry , typename Scalar > |
| void | split_AA2 (DMRG::DIRECTION::OPTION DIR, const Qbasis< Symmetry > &locBasis, const vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Apair, const vector< qarray< Symmetry::Nq > > &qloc_l, vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Al, const vector< qarray< Symmetry::Nq > > &qloc_r, vector< Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > > &Ar, const qarray< Symmetry::Nq > &qtop, const qarray< Symmetry::Nq > &qbot, Biped< Symmetry, Matrix< Scalar, Dynamic, Dynamic > > &C, bool SEPARATE_SV, double &truncWeight, double &S, map< qarray< Symmetry::Nq >, ArrayXd > &SVspec, double eps_truncWeight, size_t min_Nsv, size_t max_Nsv) |
| |